연구과제
인간-로봇 공존환경에서 사용되는 로봇의 안전성확보를 위한? 이동식 및 착용식 로봇용 기초 안전기술개발 (4년, 지원기관: 산업통상자원부)(종료)
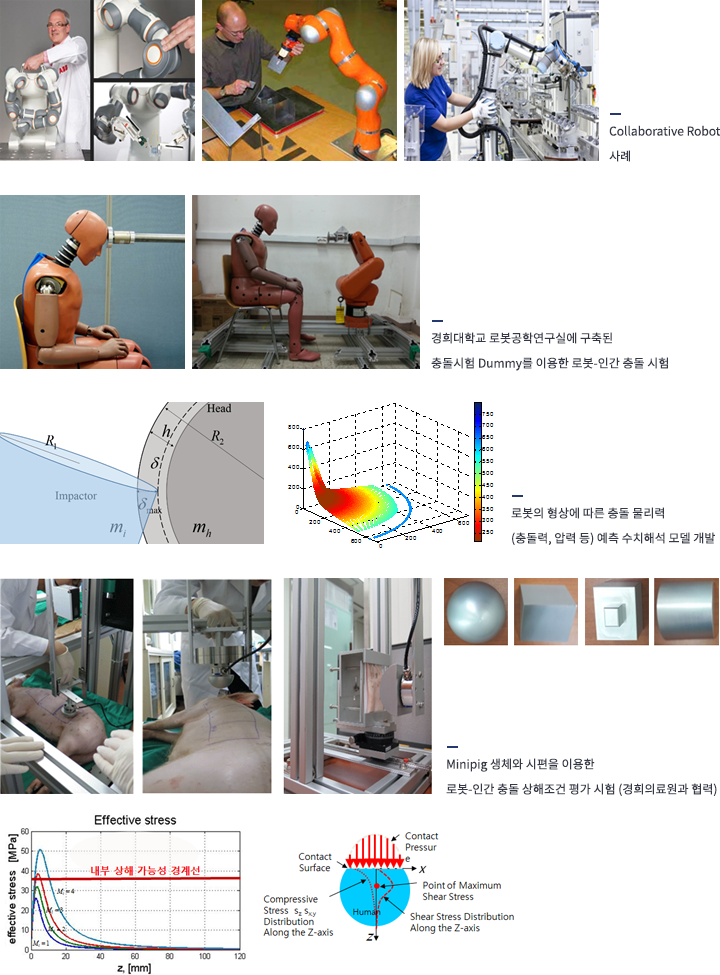
기존의 산업용 로봇은 인간과 로봇을 안전펜스로 격리시킴으로서 인간의 안전성을 확보하였으나, 최근에는 생산성 향상을 위한 경쟁이 가속화됨에 따라 인간과 로봇이 작업영역을 공유하는 사례가 점점 늘어나고 있다. 로봇이 인간-로봇 공존환경에서 사용되는 경우, 로봇과 인간 사이에 의도되었거나 의도되지 않은 동적/정적 접촉이 빈번하게 발생하게 되며, 이러한 상황에서도 인간의 안전이 반드시 보장되어야한다. 로봇과 인간의 동적 접촉(충돌)에 의해 인체에 전달되는 물리력은, 로봇의 형상, 질량, 자세, 조인트/링크의 강성, 운동 속도 등에 의해 결정되며, 충돌 시 전달되는 물리력의 안전한 한계치를 규명하고, 그 결과를 로봇 설계 및 로봇 운영 시 적용하여 보다 안전한 협동형(collaborative) 로봇을 만드는데 기여하고자 하는 것이 본 과제의 목표이다. 이를 위해, 로봇공학의 다양한 분야(로봇기구학, 로봇동역학, 충돌역학)와 더불어 경희의료원의 의공학과, 피부과, 재활의학과 등과 함께 연구를 수행하고 있다. 이론적연구, 수치해석적 연구, 실험적연구가 병행되고 있다.