연구과제
양팔작업 로봇을 위한 최대 출력 범위 150Nm의 안전모듈 및 힘-토크/조인트 센서 기술 (5년과제, 산업통상자원부 지원)(종료)
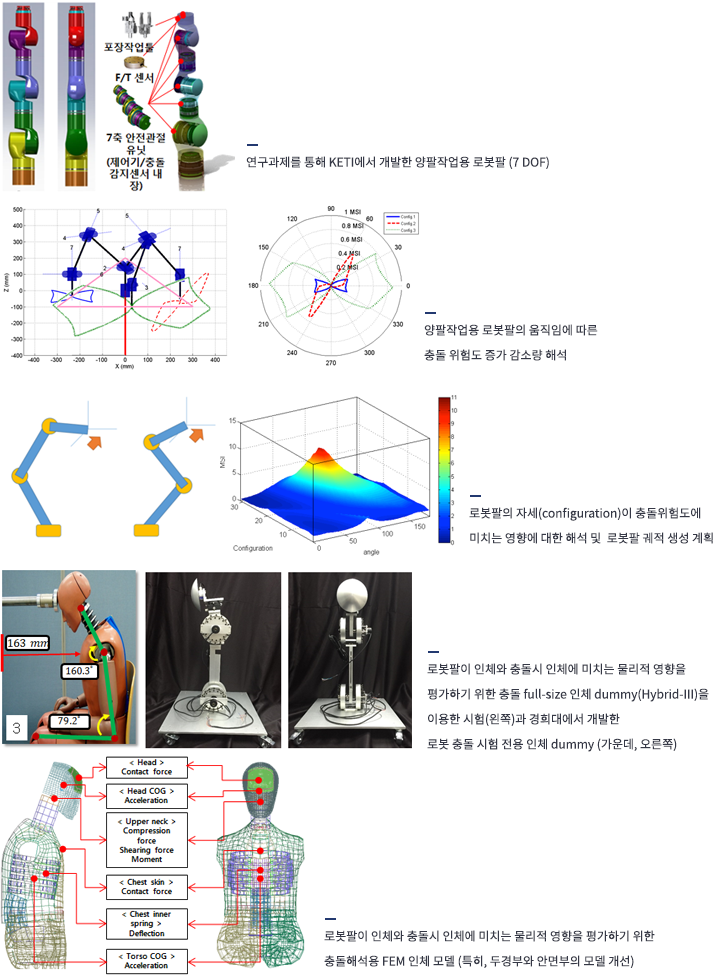
로봇-로봇, 로봇-인간의 협조 작업 시 로봇과 작업자 및 작업물의 안전을 확보하며, 작업 성능을 확보할 수 있도록 로봇과 작업환경 사이의 상호작용 힘을 측정하기 위한 센싱용 핵심부품과 조작용 툴, 그리고 이를 이용한 안전 관절유닛 기반 경량 양팔 로봇을 개발하는 연구과제이다. 이 연구는 경희대 로봇공학연구실, 전자부품연구원(KETI), DGIST, 성균관대, 한국기계연구원(KIMM) 등등의 여러 연구기관이 함께 수행하고 있다. 이 연구에서는, 로봇-인간 공존환경에서 사용되는 협동형 양팔작업 로봇의 Hardware(motor, sensor, 제어기 등) 개발, 운영 알고리즘 및 작업 기술 개발, 협동형 로봇의 안전 운전 기준 개발, 협동형 로봇의 안전규격 국제표준 개발 등의 연구가 진행되고 있다.