연구주제
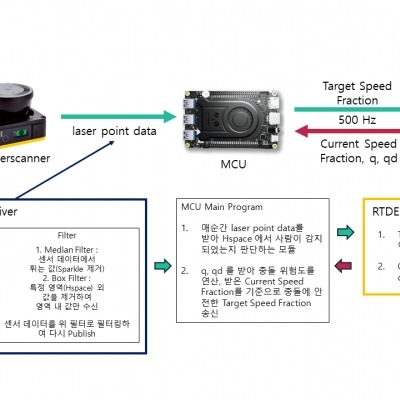
PFL 기반 로봇 안전 제어를 위한 센서 및 MCU의 통합 통신/제어 시스템 개발
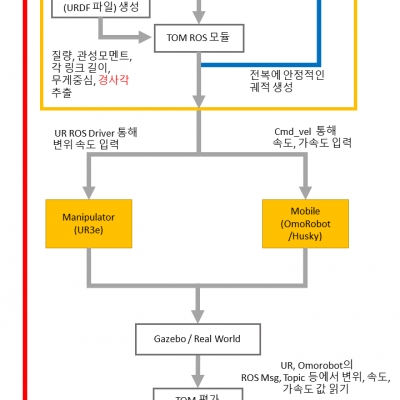
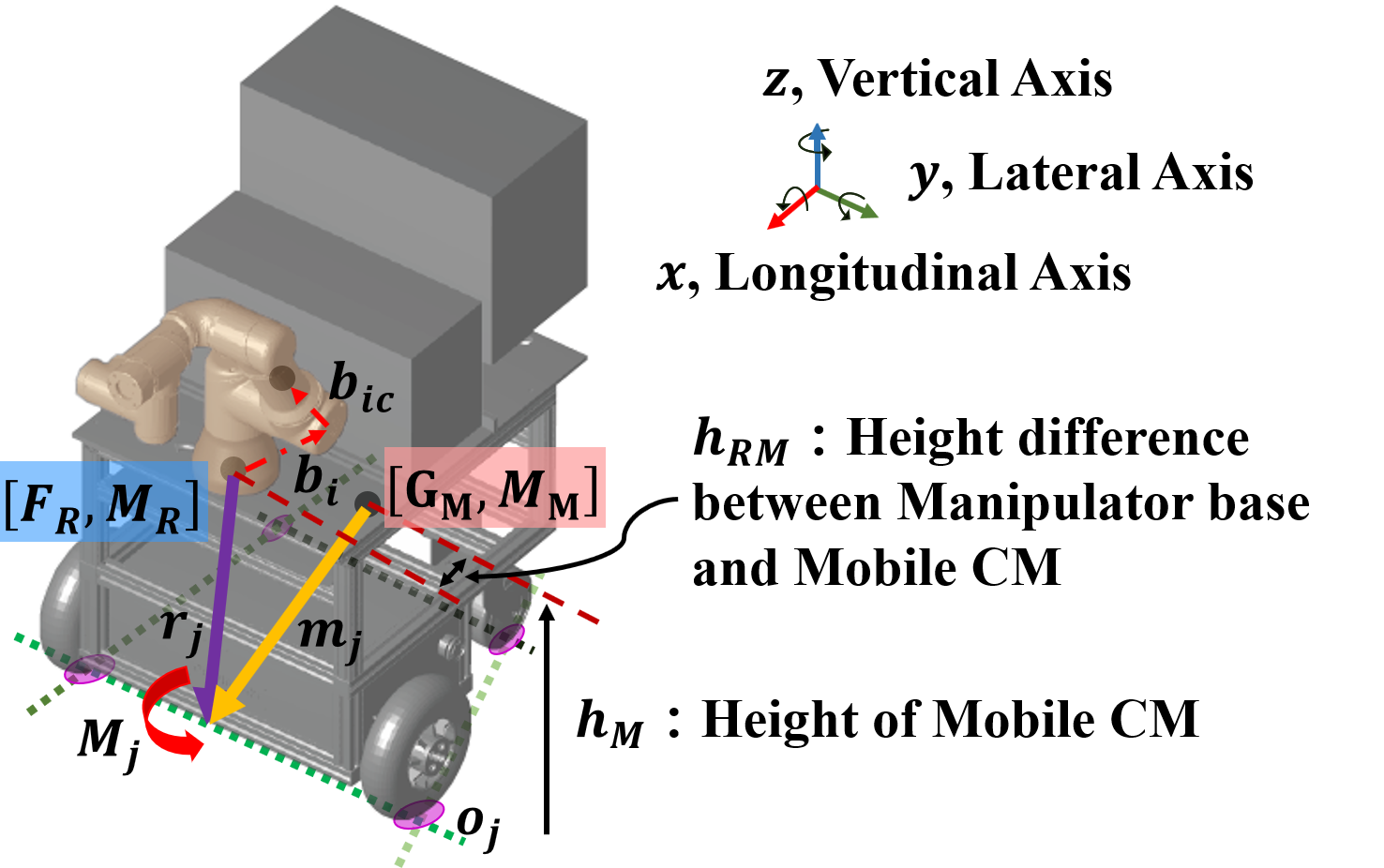
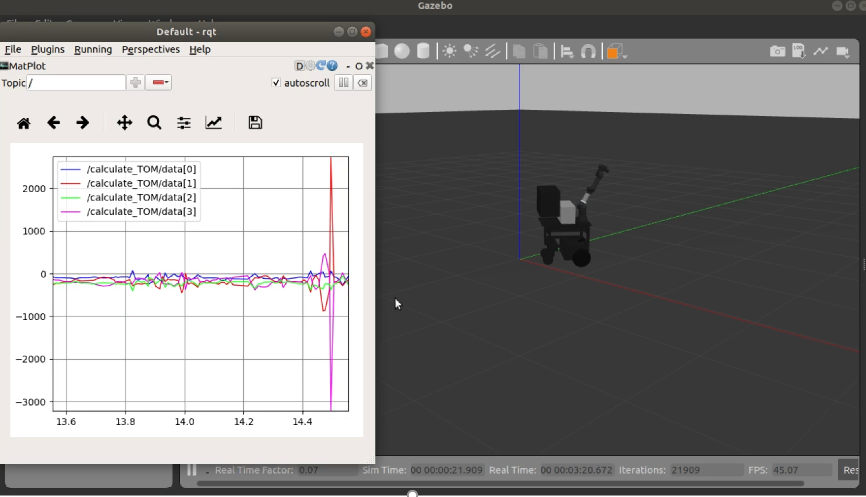
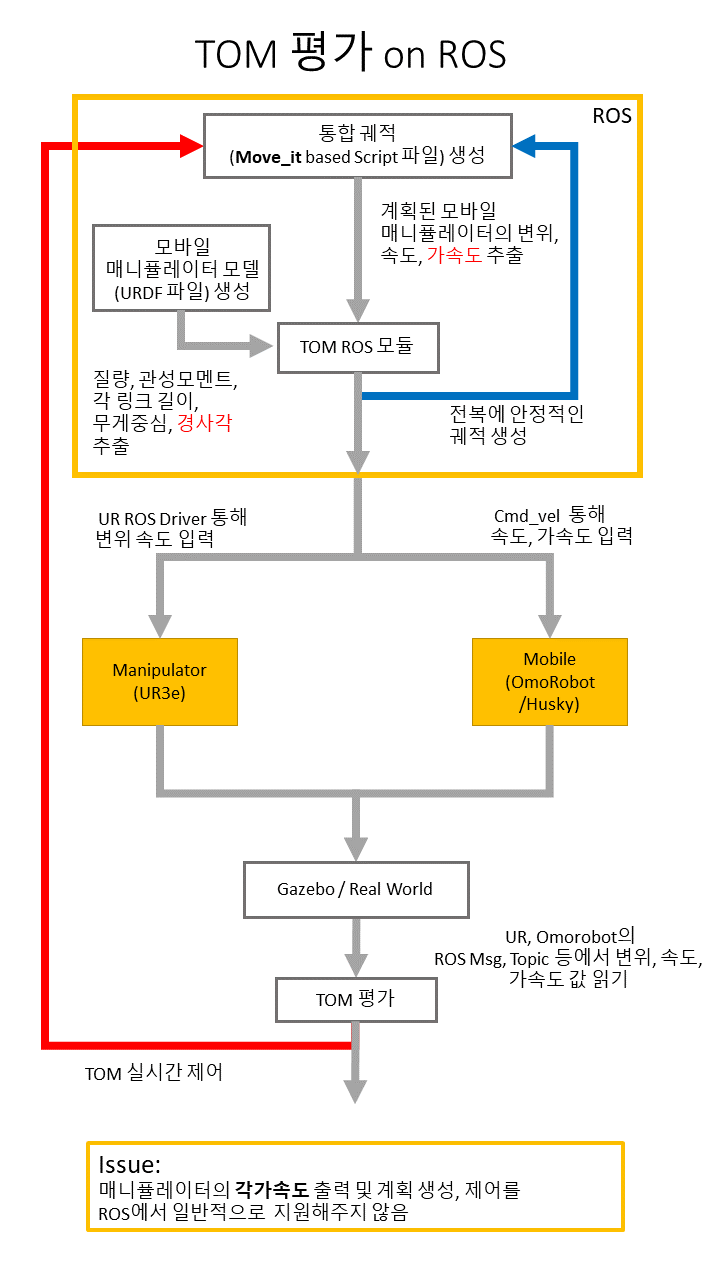
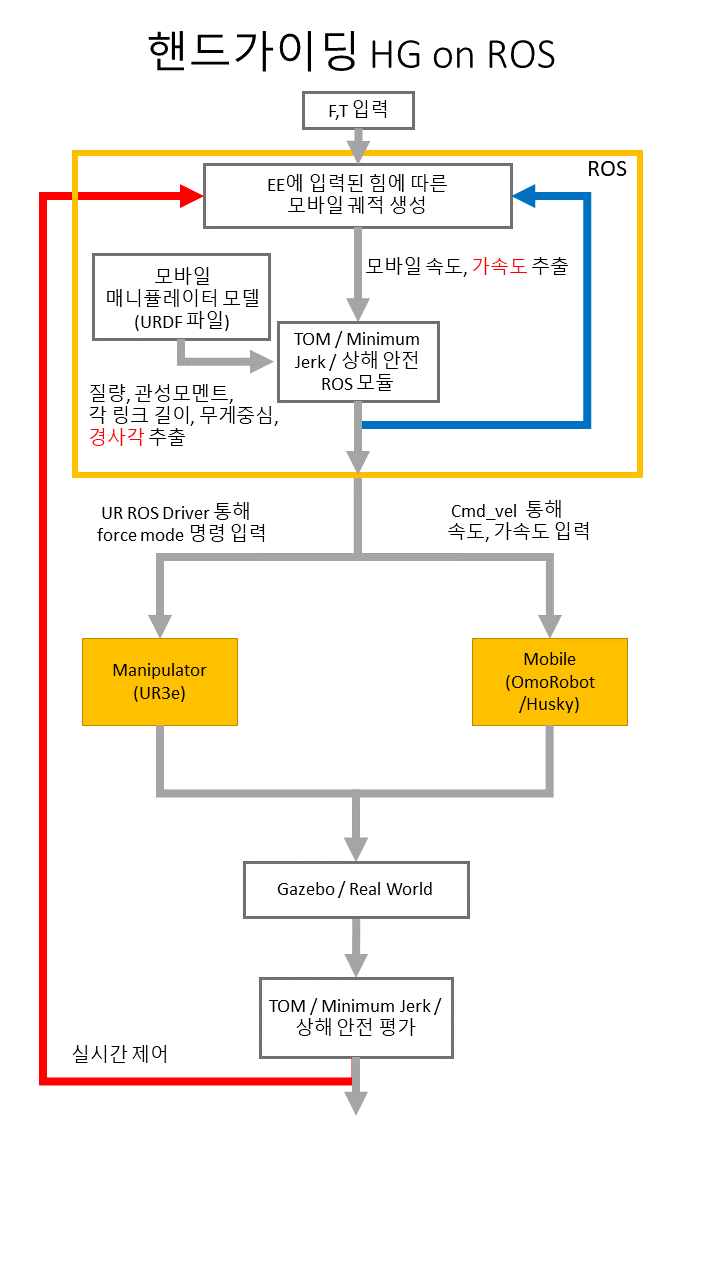
모바일 매니퓰레이터 제어 연구
연구자: 이창주
모바일 매니퓰레이터의 Compliance 제어와 Tip-over Stability를 중심으로 연구합니다.
|
 |
 |
|
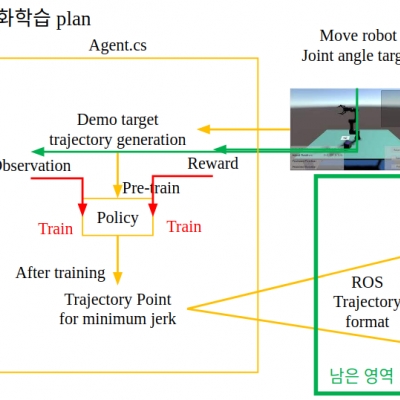
인공지능 연구
연구자: 이창주
모바일 매니퓰레이터의 Compliance 제어와 Tip-over Stability를 중심으로 연구합니다.
|
|
|
|
|
|